Deep Reinforcement Learning
Advanced Algorithms (Part I)
Chair of Safe Autonomous Systems, TU Dortmund
Summer term 2026
Ill-conditioned gradients
\[\begin{align*} r_t &= -s_t^2 - a_t^2 \\ \log\pi_\phi\agivenb{a_t}{s_t} &= -\frac{1}{2\sigma^2}(k s_t - a_t)^2 + C, \fragment{ \qquad \phi=(k,\sigma). } \\ \nablaphi\log\pi_\phi\agivenb{a_t}{s_t} &= \begin{pmatrix} -\frac{(k s_t - a_t)s_t}{\sigma^2} \\ \frac{(k s_t - a_t)^2}{\sigma^3} \end{pmatrix} \end{align*}\]
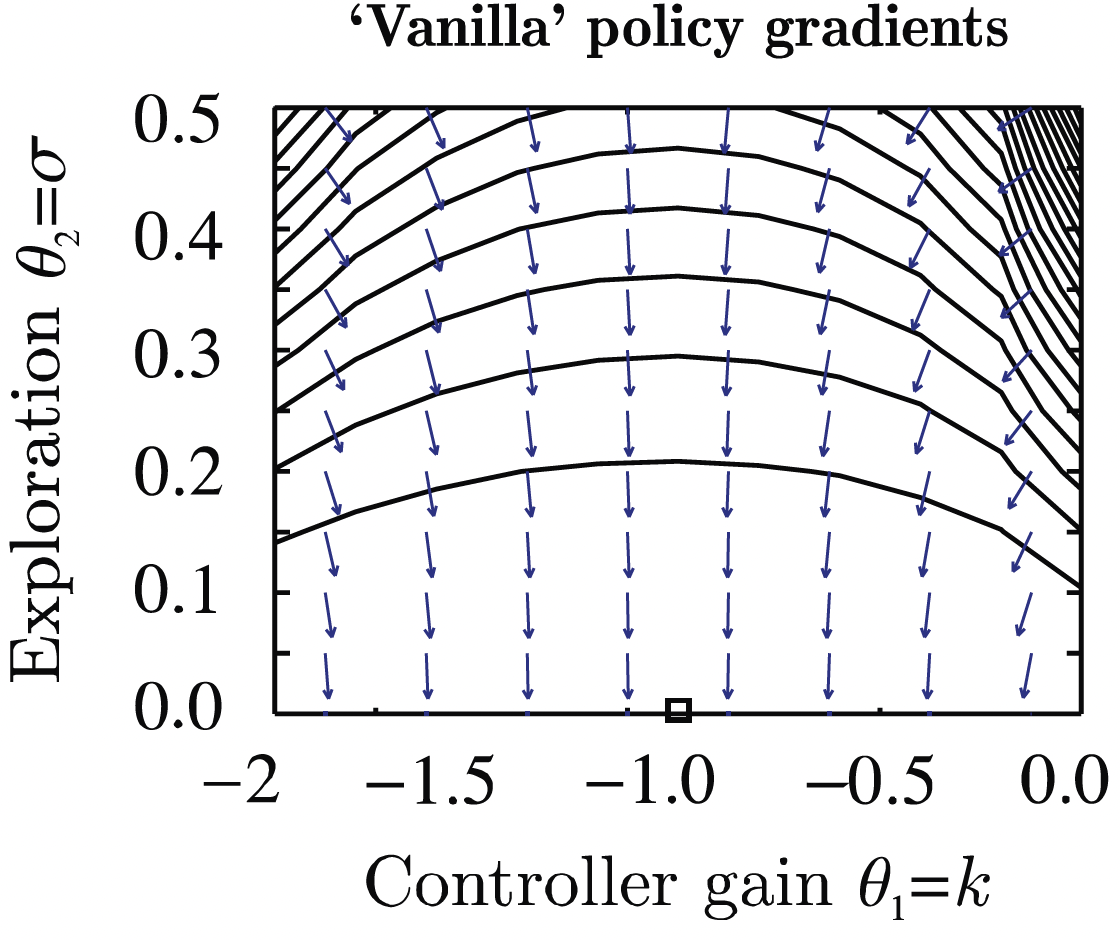
- Optimum: \(\phi^*=(-1,0)\).
- Issue: The gradients do not point towards the optimum for smaller \(\sigma\)!
- The \(\sigma^{-3}\) term blows up.
Closely related to ill-conditioned optimization problems: 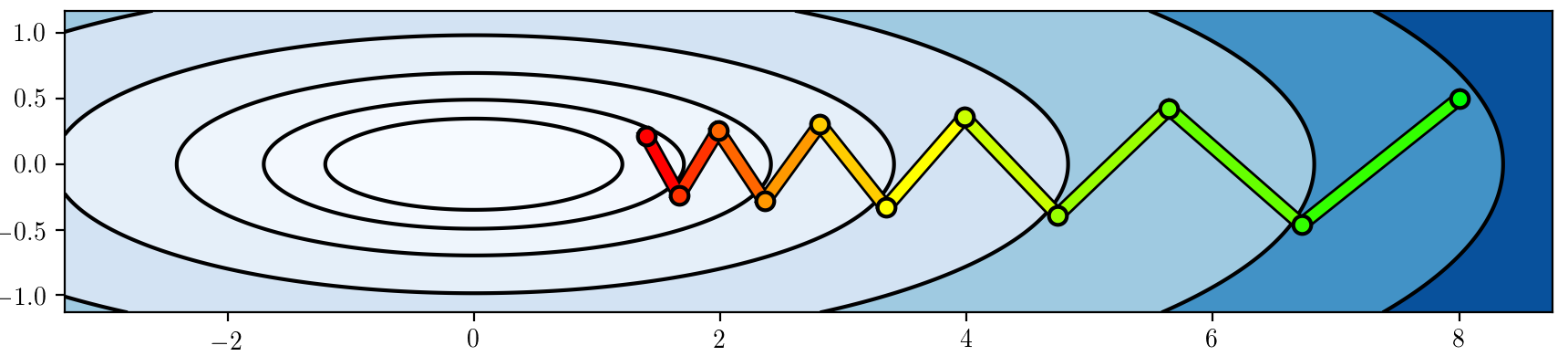
Constraining the ascent direction
- Recall the policy gradient update: \(\phi \gets \phi + \alpha \nablaphi L_\pi(\phi)\).
- A natural idea: Constrain the length of our update step!
- Linearization of our optimization problem around \(\phi\) using Taylor series expansion: \[\begin{align*} L(\phi') &= L_\pi(\phi) + \sum_{i=1}^n \pdiff{L}{\phi_i} (\phi'_i - \phi_i) + \Oc((\phi' - \phi)^2) \\ &= L_\pi(\phi) + (\phi' - \phi)^\top \nablaphi L_\pi(\phi). \end{align*}\]
- Constrained optimization of \(\phi'\) along the steepest ascent direction: \[\phi' \gets \arg\max_{\phi'} (\phi' - \phi)^\top \nablaphi L_\pi(\phi) \qquad \fragment{ \text{subject to}\qquad \norm{\phi' - \phi}^2\leq \epsilon. } \]
- But: We just saw that some parameters change probabilities a lot more than others!
Source: (Peters and Schaal 2008)
- Alternative: Rescale the gradient so that this does not happen!
- A better way to constrain the update distance: The change in distribution via the Kullback-Leibler (KL) divergence! \[ \KLdiv{\pi_\phi}{\pi_\phi'}. \]
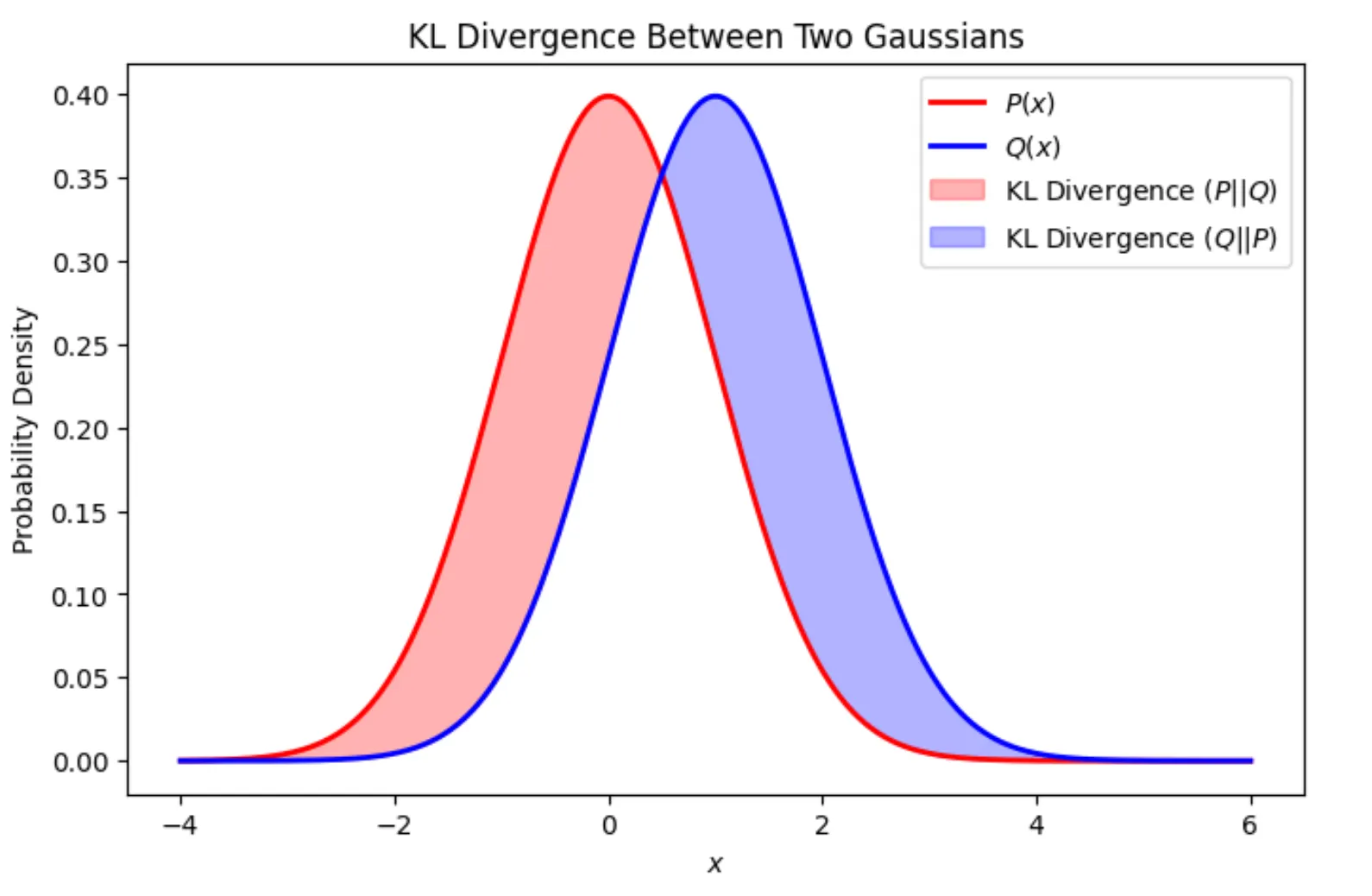
Kullback-Leibler divergence
- The Kullback-Leibler divergence (or KL divergence) measures the “distance” between two distributions (e.g., \(p(x)\) and \(q(x)\)) \[ \KLdiv{p}{q}= \begin{cases} \sum_{x\in\Xc} p(x) \log\cbracket{\frac{p(x)}{q(x)}} & \text{if}~\Xc~\text{is finite} \\ \int_{\Xc} p(x) \log\cbracket{\frac{p(x)}{q(x)}}\dx & \text{if}~\Xc~\text{is continuous} \end{cases}. \]
- It is zero if and only if \(p(x) = q(x)\).
- Intuition: Imagine you have two different maps of the exact same city.
- Map A is completely accurate. Every street, etc., is exactly where it should be.
- Map B was drawn from memory by a friend. It’s mostly right with some minor flaws.
- If you use Map B to navigate the city, you are going to make some mistakes.
- The KL divergence answers the question: “How much extra ‘gas’ (or information) will I waste if I use Map B instead of Map A?”
- KL Divergence measures the surprise or unfair penalty you get when you use \(q\) to predict something that actually follows \(p\). If \(q\) is a perfect match for \(p\) (i.e., \(q=p\)), your surprise is zero. The worse your guess (\(q\)) is, the higher the KL divergence.
- Question: What happens if our “model” \(q\) is absolutely certain that something is not going to happen (\(q(x)=0\) for some \(x\))?
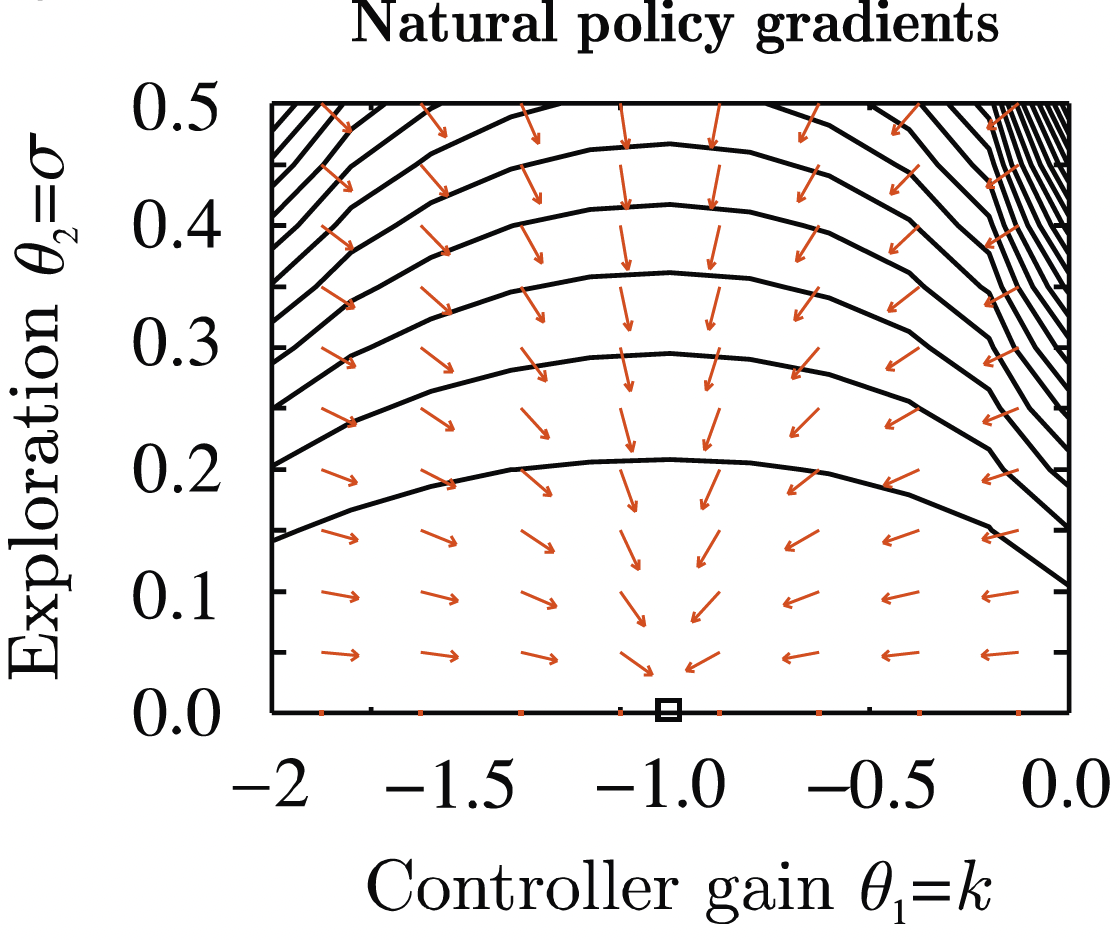
Natural policy gradient
- We have now defined a policy gradient whose update length is constrained in terms of the KL divergence: \[\begin{equation} \phi' \gets \arg\max_{\phi'} (\phi' - \phi)^\top \nablaphi L_\pi(\phi) \quad \text{subject to}\quad (\phi'-\phi)^\top F (\phi'-\phi) \leq \epsilon. \label{eq:Adv_Natural_PG} \end{equation}\]
- What remains is the question of solving \(\eqref{eq:Adv_Natural_PG}\).
- Without going into further details (e.g., (S. M. Kakade 2001; Peters and Schaal 2008))
\(\Rightarrow\) Solution: scale the policy gradient by the inverse Fisher information matrix, \[\begin{equation} \phi \gets \phi + \alpha F^{-1} \nablaphi L_\pi(\phi). \label{eq:Adv_NPG} \end{equation}\] - Intuition behind the inverse FIM \(F^{-1}\):
- Parameters with a high impact have high Fisher information.
- Scaling by the inverse “normalizes” the individual impacts.
- This techinque is known as the natural policy gradient (also covariant policy gradient).
- Preconditioning steps of this type are very common in optimization in general.
- Drawback: \(F\in\R^{d \times d}\) can be very expensive to calculate (and invert) for very large parameter vectors.
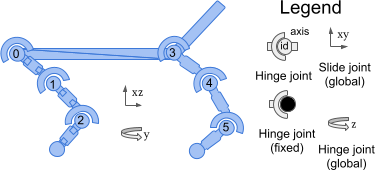
Example: Half-Cheetah
As an example, we study the Half Cheetah example from the MuJoCo library.
- \(\Sc\): 17 states.
- \(\Ac\): 6 actions.
- Reward: Forward-Cost - Control-Cost.
Results with TRPO (from the RL Baselines3 Zoo)

Drawbacks of TRPO
1. Large computational overhead
- TRPO relies on the Conjugate Gradient (CG) method to compute the matrix-free step direction \(F^{-1}g\).
- While CG is much cheaper than explicit matrix inversion, it still requires running an inner loop for every single policy update, evaluating two backpropagation passes per CG step.
2. Code complexity and fragility
- TRPO requires custom optimization pipelines. You cannot simply hand a TRPO objective to a standard deep learning optimizer like Adam.
- Requires writing both a dedicated Conjugate Gradient solver and backtracking line search.
3. Incompatibility with shared architectures
- In modern deep RL, it is common to use a shared network architecture with two heads for the policy actions (Actor) and the state-value estimates (Critic).
- Because TRPO’s constraint is calculated purely using the Fisher Information Matrix of the policy, it has no mathematical way to constrain or properly scale the value function parameters.
\(\Rightarrow\) we are forced to maintain two entirely separate neural networks.

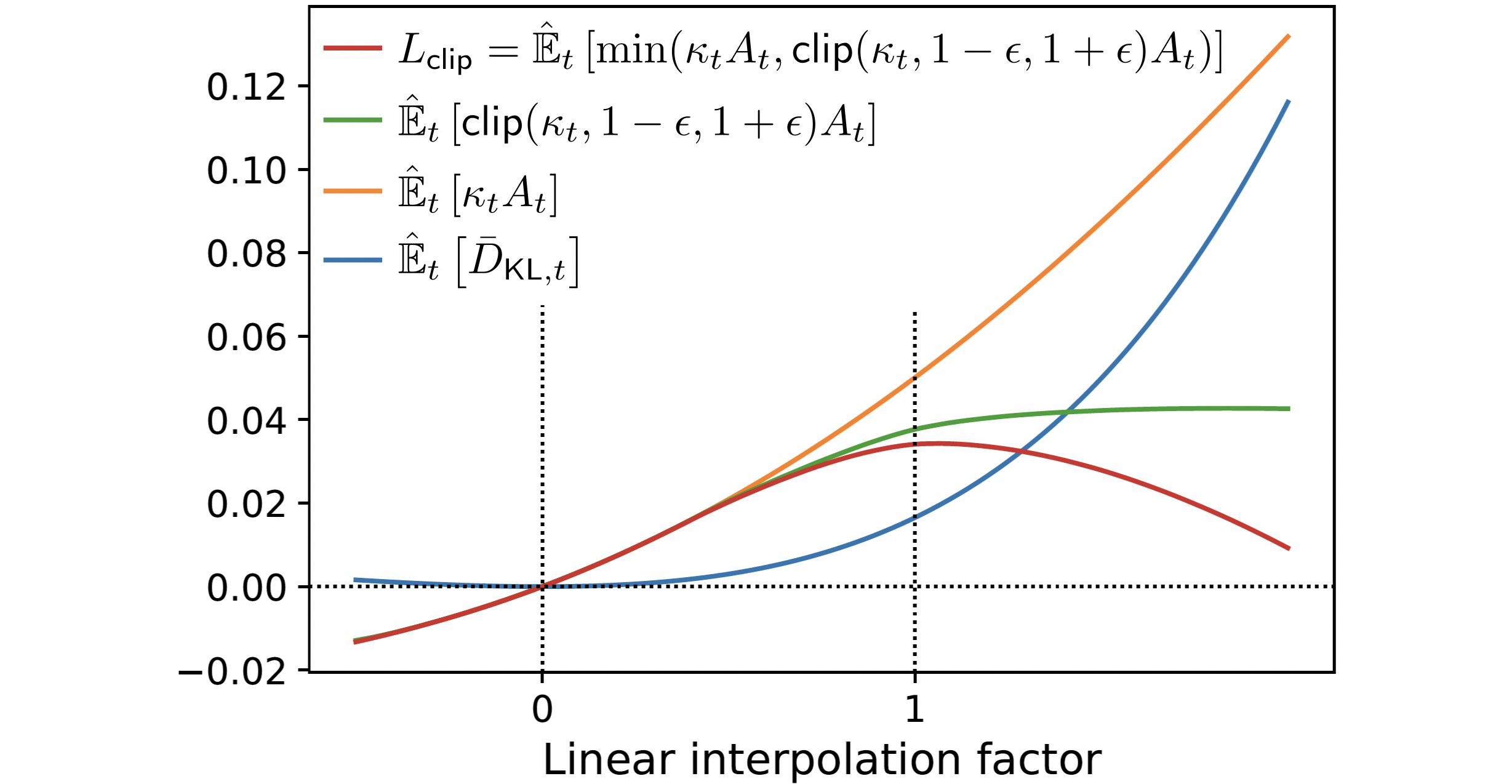
Understanding the clipped surrogate objective (1)
\[L_\mathsf{TRPO}(\phi) = \E_{s\sim \rho_{\subold{\pi}}, a\sim\subold{\pi}}\Big[\underbrace{\frac{\pi_\phi\agivenb{a}{s}}{\subold{\pi}\agivenb{a}{s}}}_{=\kappa(\phi)}A_{\subold{\pi}}(s,a)\Big]\quad \text{vs.} \quad L_\mathsf{CLIP}(\phi) = \Exphat{\min\left( \kappa_t(\phi)A_t, \, \mathsf{clip}(\kappa_t(\phi), 1-\epsilon, 1+\epsilon)A_t \right)}.\]
The clipping function \(\mathsf{clip}(r_t(\phi), 1-\epsilon, 1+\epsilon)\) bounds the importance sampling ratio \(\kappa_t\) to
- at most \(1+\epsilon\) if \(A>0\),
- at least \(1-\epsilon\) if \(A<0\).
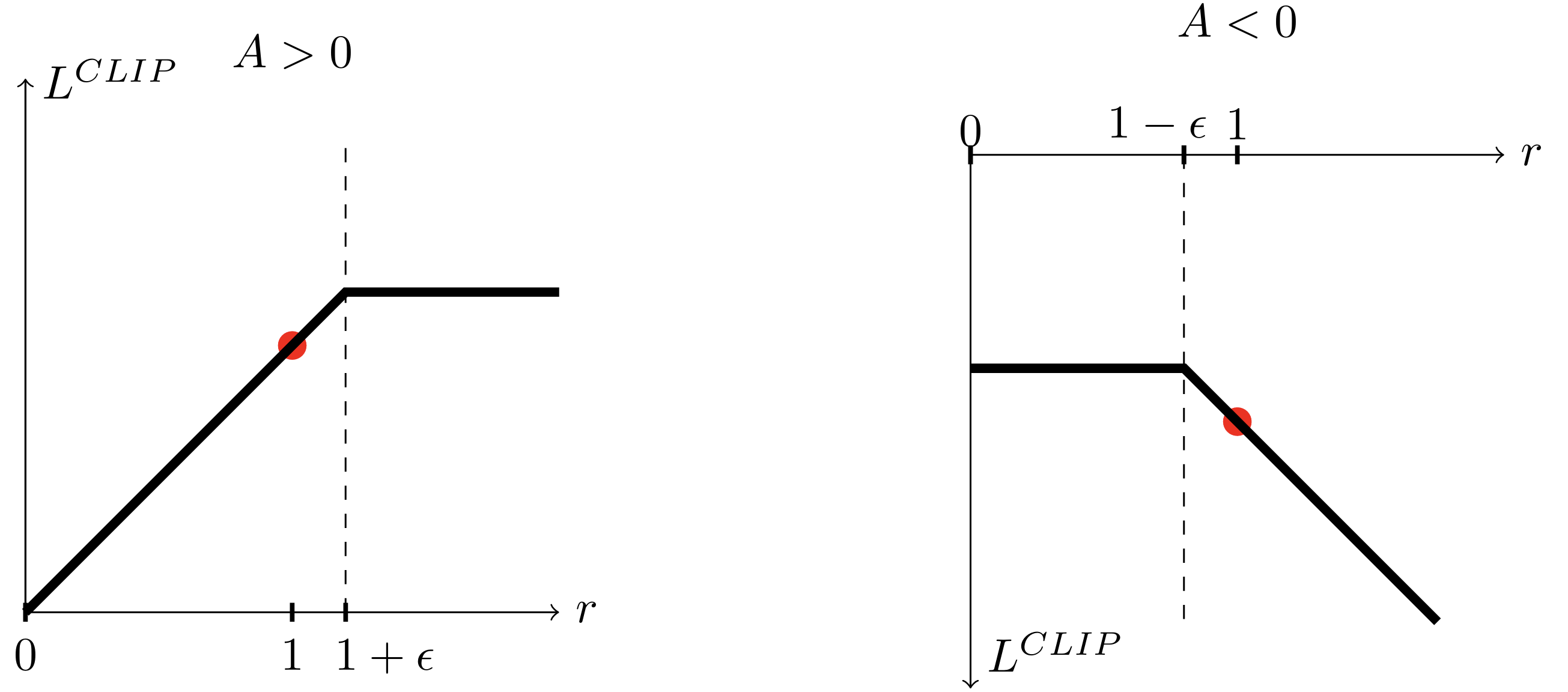
The \(\min\) function ensures that we take the minimum of the clipped and unclipped objective \(\Rightarrow\) \(L_\mathsf{CLIP}\) is a lower (i.e., pessimistic) bound on the unclipped objective.
Example: Half-Cheetah
As an example, we study the Half Cheetah example from the MuJoCo library.
- \(\Sc\): 17 states.
- \(\Ac\): 6 actions.
- Reward: Forward-Cost - Control-Cost.